Kinematics
Idea: Analogs
Rotational kinematics variables are analogous to translational ones:
\begin{align*}
\Delta \theta &\leftrightarrow \Delta x \\
\vec \omega &\leftrightarrow \Delta \vec v \\
\vec \alpha &\leftrightarrow \vec a.
\end{align*}
This gives us familiar looking kinematics equations:
\begin{align*}
\Delta \theta &= \omega_0t + \frac 12 \alpha t^2 \\
\omega_f^2 &= \omega_0^2 + 2\alpha \Delta \theta.
\end{align*}
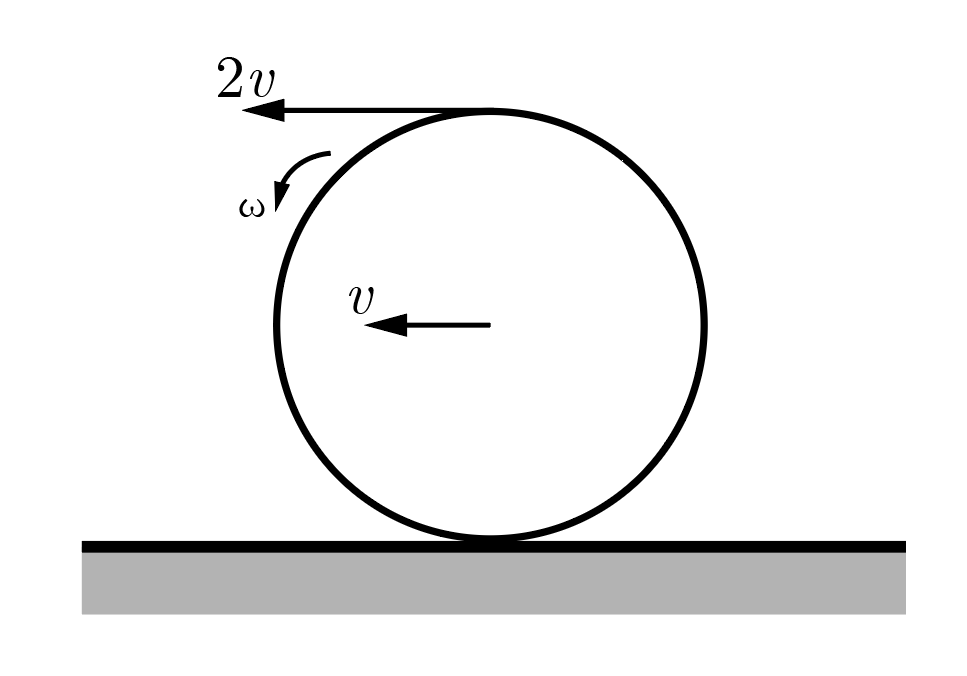
Theorem: Instantaneous Center of Rotation
We know from the definition of angular velocity, that if we have a rigid body rotating around a fixed point with angular velocity $\omega$, then the velocity of a given point $\mathbf r$ from the center has velocity
$$\mathbf v = \mathbf \omega \times \mathbf r.$$
However, it turns out the general motion of any rigid body (not necessarily fixed to a pivot) has an instantaneous center of rotation. A general rigid body has a center of mass with some velocity which is also spinning. So, the velocity of a point $\mathbf r$ from the com has velocity:
$$\mathbf v = \mathbf v_{\text{cm}} + \omega \times \mathbf r = \omega \times (\mathbf r - \mathbf r_{\text{cor}}),$$ where $\mathbf r_{\text{cor}}$ is the center of rotation. Finding this center of rotation is often helpful for intuition.
Tip: Reference Frames
You can use reference frames just as you did in regular kinematics! Moving into a rotational reference frame with speed $\omega$ would just mean subtracting off that angular velocity on all the other objects, as usual.
Intro to Dynamics
Definition: Torque & Moment of Inertia
The rotational analog of $F=ma$ is torque, $$\tau = I\alpha = \mathbf r \times \mathbf F,$$ where $I$ is the moment of inertia, which is defined as
$$I = \sum m_i r_i^2.$$
Theorem: MOI theorems
The parallel axis theorem tells us $$I = I_{\text{cm}} + Md^2,$$where $d$ is the distance of the new axis from the COM. The perpendicular axis theorem tells us that for a flat 2D object, the moment of inertia about the perpendicular axis is equal to the sum of two in-plane axes. That is, if the object lies in the $x$-$y$ plane in any orientation,
$$I_z = I_x + I_y.$$
Tip
Don't be afraid to write down lots of equations for rotational dynamics problems. You will usually need an $F=ma$, a $\tau = I\alpha$, and also a constraint such as $a = \alpha r$.